## 8.2 PULPino介绍
8.2.1 PULPino与PULP的关系
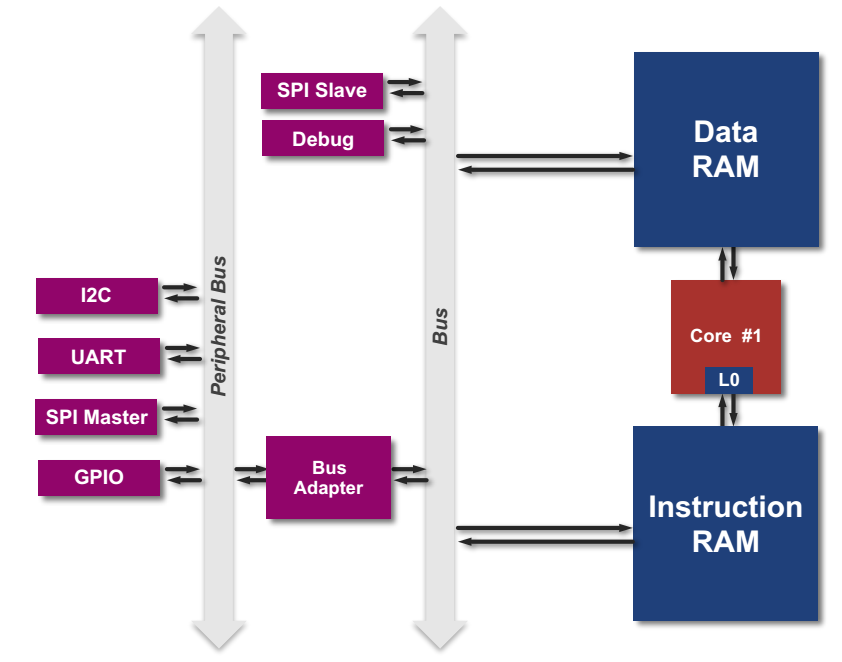
PULPino是PULP的简化版本,如图8-2所示。</br>
 </br>
图8-2 PULPino架构是PULP架构的简化版[2]</br></br>
对比图8-1PULP架构设计可知PULPino相比PULP在如下几个方面做了简化:</br>
(1)多核变为单核;</br>
(2)指令RAM、数据RAM都不再需要支持多核;</br>
(3)去掉了二级缓存;</br>
(4)去掉了DMA。</br>
此外还有一个变化:源代码于2016年3月1日开源,采用 Solderpad license,使用的编程语言是System Verilog,PULPino支持处理器核是采用OpenRISC指令集的OR10N,但是在目前的开源版本中只支持RISC-V指令集。</br>
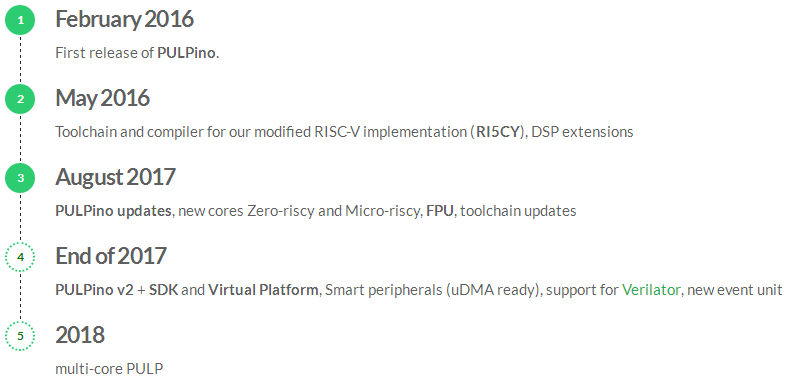
图8-3是PULPino的发展路线图,从中可知,开源PULPino的最终目标还是为了开源PULP,从易到难,便于用户接受,预计在2018年将开源PULP。</br>
</br>
图8-2 PULPino架构是PULP架构的简化版[2]</br></br>
对比图8-1PULP架构设计可知PULPino相比PULP在如下几个方面做了简化:</br>
(1)多核变为单核;</br>
(2)指令RAM、数据RAM都不再需要支持多核;</br>
(3)去掉了二级缓存;</br>
(4)去掉了DMA。</br>
此外还有一个变化:源代码于2016年3月1日开源,采用 Solderpad license,使用的编程语言是System Verilog,PULPino支持处理器核是采用OpenRISC指令集的OR10N,但是在目前的开源版本中只支持RISC-V指令集。</br>
图8-3是PULPino的发展路线图,从中可知,开源PULPino的最终目标还是为了开源PULP,从易到难,便于用户接受,预计在2018年将开源PULP。</br>
 </br>
图8-3 PULPino的发展路线图</br></br>
</br>
图8-3 PULPino的发展路线图</br></br>
8.2.2 PULPino的结构
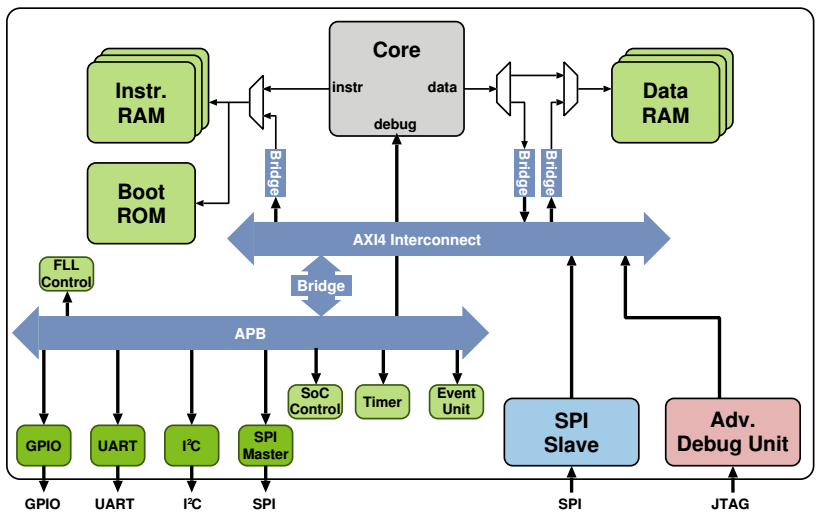
相较图8-2而言,图8-4更加具体、完整的显示了PULPino的结构。</br>
 </br>
图8-4 PULPino的结构[4]</br></br>
从图中可以发现PULPino有如下一些特点:</br>
(1)采用的是指令RAM、数据RAM分开的哈佛结构;</br>
(2)增加了一个Boot ROM,其中可以存储启动代码,利用该启动代码可以加载连接至SPI接口的Flash中的程序。</br>
(3)采用的AXI4、APB两级总线结构。</br>
(4)具有外设接口,包括GPIO、UART、I2C、SPI等。</br>
(5)含有一个SoC Controll模块,其作用是整个SoC平台的控制信息,包括:是否使能时钟门、设置启动地址、架构信息等。</br>
(6)提供了一个Advanced Debug Unit,提供了标准调试JTAG接口,使得调试器可以访问指令RAM、数据RAM、处理器内部寄存器,以及外设对应的控制寄存器等。</br>
(7)提供了一个SPI Slave接口,直接连接在AXI互连总线上,可以通过该接口在不影响处理器的情况下,访问指令RAM、数据RAM、处理器内部寄存器,以及外设对应的控制寄存器等。</br>
图8-2中各模块的详细功能、寄存器作用可以参考文献[4]。</br>
</br>
图8-4 PULPino的结构[4]</br></br>
从图中可以发现PULPino有如下一些特点:</br>
(1)采用的是指令RAM、数据RAM分开的哈佛结构;</br>
(2)增加了一个Boot ROM,其中可以存储启动代码,利用该启动代码可以加载连接至SPI接口的Flash中的程序。</br>
(3)采用的AXI4、APB两级总线结构。</br>
(4)具有外设接口,包括GPIO、UART、I2C、SPI等。</br>
(5)含有一个SoC Controll模块,其作用是整个SoC平台的控制信息,包括:是否使能时钟门、设置启动地址、架构信息等。</br>
(6)提供了一个Advanced Debug Unit,提供了标准调试JTAG接口,使得调试器可以访问指令RAM、数据RAM、处理器内部寄存器,以及外设对应的控制寄存器等。</br>
(7)提供了一个SPI Slave接口,直接连接在AXI互连总线上,可以通过该接口在不影响处理器的情况下,访问指令RAM、数据RAM、处理器内部寄存器,以及外设对应的控制寄存器等。</br>
图8-2中各模块的详细功能、寄存器作用可以参考文献[4]。</br>
8.2.3 处理器核
PULPino目前支持4种不同配置的、采用RISC-V指令集的处理器核,如下:</br>
(1)RI5CY:这是最早开源的处理器核,支持RV32-ICM,并且支持算术指令扩展(ALU Extension)、硬件循环(Hardware Loop)、地址自增的访存指令(post-incrementing Load & Strore Instruciton)、乘累加指令(Multiply-Accumulate)、向量操作(Vectorial)等扩展。</br>
(2)RI5CY+FPU:包括RI5CY,以及一个符合IEEE-754标准的单精度FPU。</br>
(3)Zero-riscy:支持RV32-ICM,在占用资源上做了优化。</br>
(4)Micro-riscy: 这是4种配置中占用资源最少的,支持RV32-EC,具有16个寄存器,且不支持硬件乘法。</br>
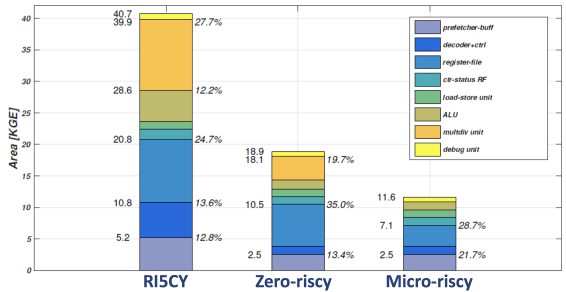
不同配置的资源占用情况如图8-5所示。Micro-riscy的资源占用是RI5CY的接近1/4。</br></br>
 </br>
图8-5 不同配置的资源占用情况[5]</br></br>
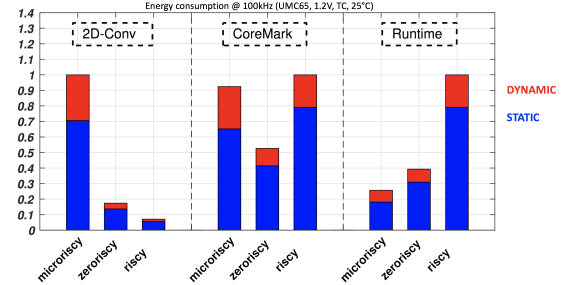
图8-6是不同配置在不同应用环境中的能耗情况。从图中可以发现,不同的配置适合于不同的应用场景,如果用于数字信号处理领域,有比较多的卷积运算,那么RI5CY的能耗是最低的,因为它做了指令扩展,内部有专用硬件用于实现卷积运算。如果用于控制领域,那么Micro-riscy的能耗最低。所以,用户需要依据不同的应用场景,配置PULPino。</br></br>
</br>
图8-5 不同配置的资源占用情况[5]</br></br>
图8-6是不同配置在不同应用环境中的能耗情况。从图中可以发现,不同的配置适合于不同的应用场景,如果用于数字信号处理领域,有比较多的卷积运算,那么RI5CY的能耗是最低的,因为它做了指令扩展,内部有专用硬件用于实现卷积运算。如果用于控制领域,那么Micro-riscy的能耗最低。所以,用户需要依据不同的应用场景,配置PULPino。</br></br>
 </br>
图8-6 不同配置在不同应用环境中的能耗情况[5]</br>
</br>
图8-6 不同配置在不同应用环境中的能耗情况[5]</br>
8.2.4 接口描述
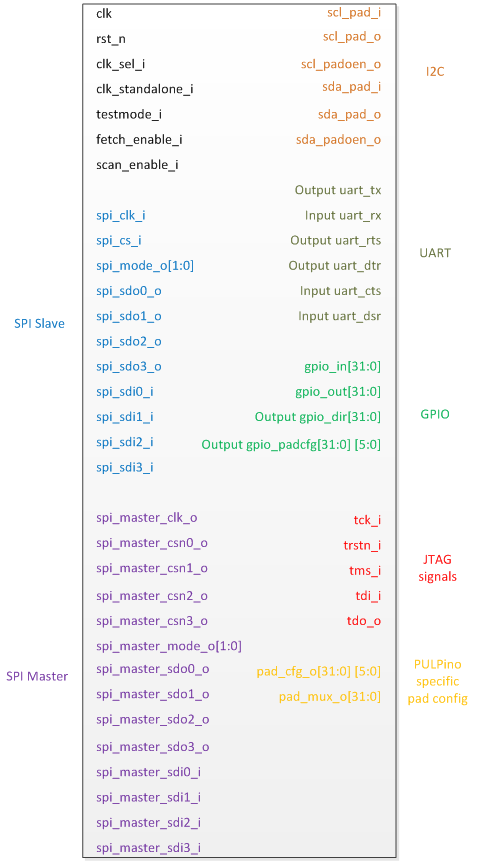
开发者可以在https://github.com/pulp-platform/pulpino 下载得到PULPino的源代码,其中rtl目录下的pulpino_top.sv是PULPino的顶层文件,通过该文件可以得到PULPino的接口示意图如图8-7所示。对于大多数接口都可以通过接口名称最后的_i还是_o区分出是输入接口还是输出接口。</br></br>
 </br>
图8-7 PULPino接口示意图</br></br>
按照功能可以分为几类:全局信号接口、SPI Slave、SPI Master、I2C、UART、GPIO、JTAG、pad config等,与图8-4基本一致。其中全局接口的描述如表8-2所示。</br></br>
表8-2 PULPino的全局接口</br>
</br>
图8-7 PULPino接口示意图</br></br>
按照功能可以分为几类:全局信号接口、SPI Slave、SPI Master、I2C、UART、GPIO、JTAG、pad config等,与图8-4基本一致。其中全局接口的描述如表8-2所示。</br></br>
表8-2 PULPino的全局接口</br>
| 信号名 | 作用 |
| clk | 时钟信号 |
| rst_n | 复位信号 |
| clk_sel_i | 用来选择工作时钟,如果是0,那么时钟就是clk,反之,时钟来自一个锁频环,用于ASIC生产时,clk_sel_i设置为1 |
| clk_standalone_i | 与锁频环相关的控制信号 |
| testmode_i | 如果为1,那么禁止clock gate,反之,使能clock gate |
| fetch_enable_i | 如果为1,表示开始取指译码执行 |
| scan_enable_i | 与锁频环相关的控制信号 |
8.2.5 地址空间分配
PULPino默认的指令RAM、数据RAM的大小都是32KB,在rtl目录下的core_region.sv的最开始有如下定义,可以依据需求修改指令RAM、数据RAM的大小。</br>
module core_region
#(
parameter AXI_ADDR_WIDTH = 32,
parameter AXI_DATA_WIDTH = 64,
parameter AXI_ID_MASTER_WIDTH = 10,
parameter AXI_ID_SLAVE_WIDTH = 10,
parameter AXI_USER_WIDTH = 0,
parameter DATA_RAM_SIZE = 32768, // in bytes
parameter INSTR_RAM_SIZE = 32768 // in bytes
)
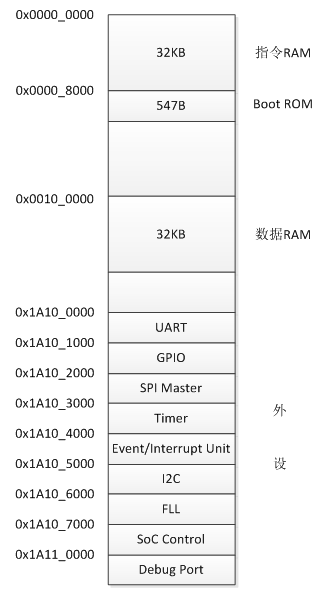
默认的地址空间分配如图8-8所示。该图与参考文献[4]的图2.1有差别,主要是Boot ROM的起始地址不同,此处是依据实际代码确定Boot ROM起始地址是0x0000_8000,参考文献[4]的图2.1中Boot ROM起始地址是0x0008_0000。</br></br>
 </br>
图8-8 默认的地址空间分配</br></br>
整体上可以分为四个区域:指令RAM、Boot ROM、数据RAM、外设。这个地址空间分配方案是在rtl目录下的top.sv中定义的,如下,可以通过修改其中的代码,实现地址空间分配方案的重新定义。</br>
</br>
图8-8 默认的地址空间分配</br></br>
整体上可以分为四个区域:指令RAM、Boot ROM、数据RAM、外设。这个地址空间分配方案是在rtl目录下的top.sv中定义的,如下,可以通过修改其中的代码,实现地址空间分配方案的重新定义。</br>
axi_node_intf_wrap
#(
.NB_MASTER ( 3 ),
.NB_SLAVE ( 3 ),
.AXI_ADDR_WIDTH ( `AXI_ADDR_WIDTH ),
.AXI_DATA_WIDTH ( `AXI_DATA_WIDTH ),
.AXI_ID_WIDTH ( `AXI_ID_MASTER_WIDTH ),
.AXI_USER_WIDTH ( `AXI_USER_WIDTH )
)
axi_interconnect_i
(
.clk ( clk_int ),
.rst_n ( rstn_int ),
.test_en_i ( testmode_i ),
.master ( slaves ),
.slave ( masters ),
.start_addr_i ( { 32'h1A10_0000, 32'h0010_0000, 32'h0000_0000 } ),
.end_addr_i ( { 32'h1A11_FFFF, 32'h001F_FFFF, 32'h000F_FFFF } )
);
上述代码定义了AXI总线上三个设备的地址,如下:
- 设备1:起始地址是32'h1A10_0000,终止地址是32'h1A11_FFFF
- 设备2:起始地址是32'h0010_0000,终止地址是32'h001F_FFFF
- 设备3:起始地址是32'h0000_0000,终止地址是32'h000F_FFFF 结合图8-4、图8-8可以非常直观的发现,设备1就是图8-8中的各种外设的地址空间,也就是图8-4中的挂在APB总线下的各种外设;设备2就是图8-8中的数据RAM;设备3就是图8-8中指令RAM+Boot ROM。</br> 在rtl目录下的instr_ram_wrap.sv中依据指令地址,判断是从Boot ROM还是从指令RAM中取指令,如下:</br>
module instr_ram_wrap
#(
parameter RAM_SIZE = 32768, // in bytes
// one bit more than necessary, for the boot rom
parameter ADDR_WIDTH = $clog2(RAM_SIZE) + 1,
parameter DATA_WIDTH = 32
)(
......
// 为1表示从Boot ROM中取指,反之,从指令RAM中取指
assign is_boot = (addr_i[ADDR_WIDTH-1] == 1'b1);
......
在include\apb_bus.sv中由各中外设的地址空间定义,如下:
// MASTER PORT TO CVP
`define UART_START_ADDR 32'h1A10_0000
`define UART_END_ADDR 32'h1A10_0FFF
// MASTER PORT TO GPIO
`define GPIO_START_ADDR 32'h1A10_1000
`define GPIO_END_ADDR 32'h1A10_1FFF
// MASTER PORT TO SPI MASTER
`define SPI_START_ADDR 32'h1A10_2000
`define SPI_END_ADDR 32'h1A10_2FFF
// MASTER PORT TO TIMER
`define TIMER_START_ADDR 32'h1A10_3000
`define TIMER_END_ADDR 32'h1A10_3FFF
// MASTER PORT TO EVENT UNIT
`define EVENT_UNIT_START_ADDR 32'h1A10_4000
`define EVENT_UNIT_END_ADDR 32'h1A10_4FFF
// MASTER PORT TO I2C
`define I2C_START_ADDR 32'h1A10_5000
`define I2C_END_ADDR 32'h1A10_5FFF
// MASTER PORT TO FLL
`define FLL_START_ADDR 32'h1A10_6000
`define FLL_END_ADDR 32'h1A10_6FFF
// MASTER PORT TO SOC CTRL
`define SOC_CTRL_START_ADDR 32'h1A10_7000
`define SOC_CTRL_END_ADDR 32'h1A10_7FFF
// MASTER PORT TO DEBUG
`define DEBUG_START_ADDR 32'h1A11_0000
`define DEBUG_END_ADDR 32'h1A11_7FFF
8.2.6 中断处理过程
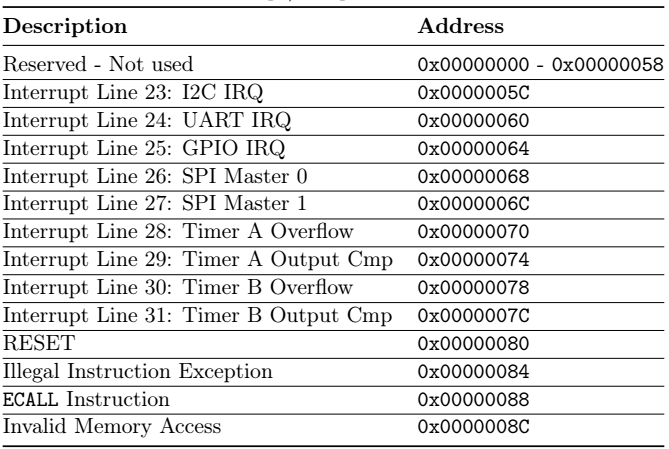
PULPino采用中断向量表的方式处理中断,图8-9是默认的中断类型,及其对应的中断处理例程的入口地址,每个中断处理例程占用4个字节,可以防止一条32位的指令,或者两条16位的指令,一般是转移指令,转移到具体的中断处理函数。</br>
 </br>
图8-9 中断向量表</br>
当中断发生时,处理器将PC寄存器保存到MEPC,将MSTATUS寄存器保存到MESTATUS,当从中断处理例程返回时,将MEPC的值恢复到PC,将MESTATUS的值恢复到MSTATUS。</br>
</br>
图8-9 中断向量表</br>
当中断发生时,处理器将PC寄存器保存到MEPC,将MSTATUS寄存器保存到MESTATUS,当从中断处理例程返回时,将MEPC的值恢复到PC,将MESTATUS的值恢复到MSTATUS。</br>
参考文献
[1]PULP - An Open Parallel Ultra-Low-Power Processing-Platform, http://iis-projects.ee.ethz.ch/index.php/PULP,2017-8</br> [2]Florian Zaruba, Updates on PULPino, The 5th RISC-V Workshop, 2016.</br> [3]Michael Gautschi,etc,Near-Threshold RISC-V Core With DSP Extensions for Scalable IoT Endpoint Devices, IEEE Transactions on Very Large Scale Integration Systems</br> [4]Andreas Traber, Michael Gautschi,PULPino: Datasheet,2016.11</br> [5]http://www.pulp-platform.org/</br>